











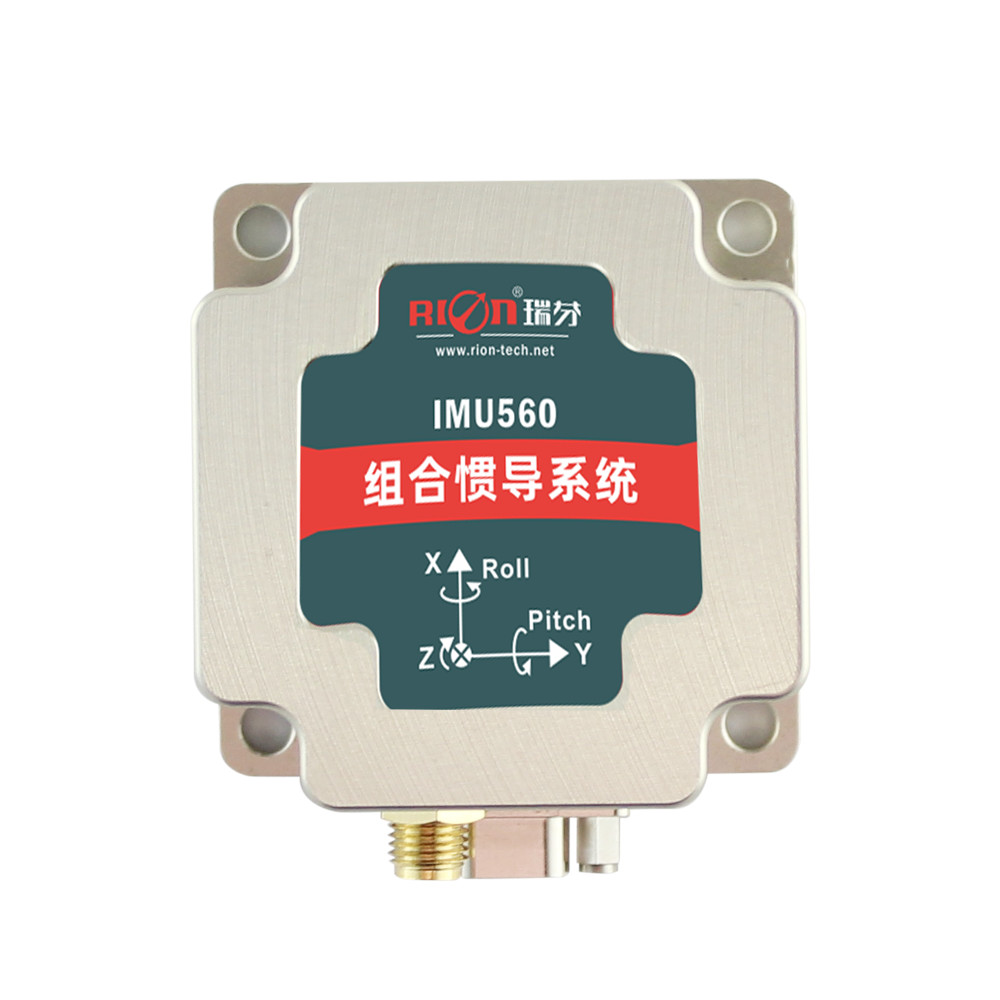



Volgens de omwentelingsorde van z-y-x, wanneer de positieve richting van de x-As aan de voorzijde van de drager wordt geleid, is de draaihoek rond de z-As de rubriekhoek, is de draaihoek rond de y-As de hoogtehoek, en de draaihoek rond de x-As is de broodjeshoek.
